
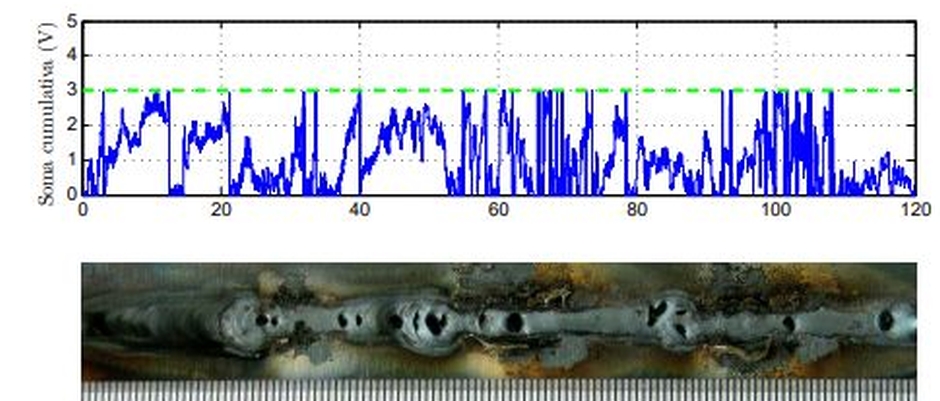
Sensores inteligentes são utilizados para detecção de defeitos em processos de fabricação.
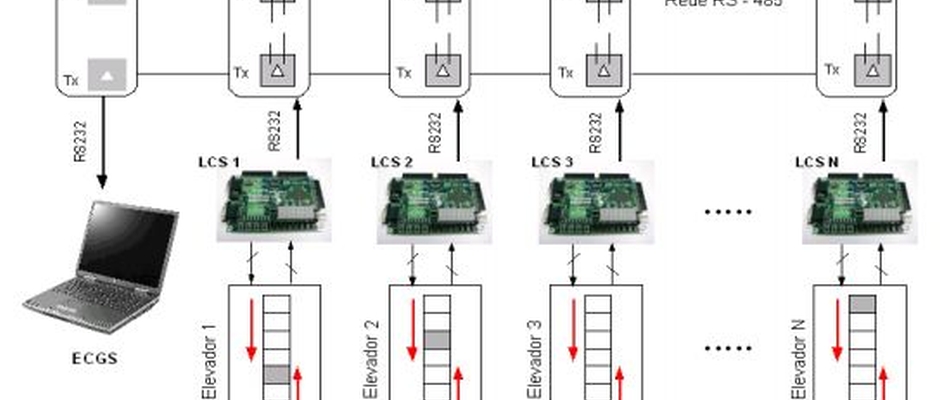
Sistemas de automação avançados podem se adaptar às necessidades dos usuários.
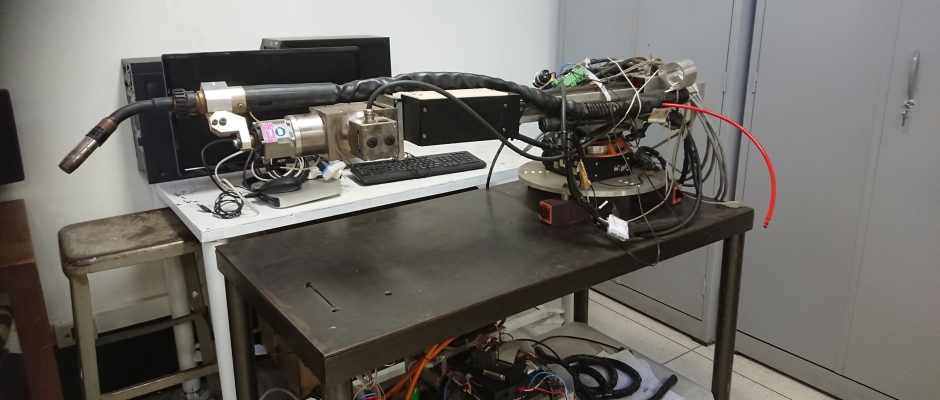
Robôs customizados para aplicações específicas entregam melhores resultados.